Accurate Fruit Localisation using High-Resolution LiDAR-Camera Fusion and Instance Segmentation
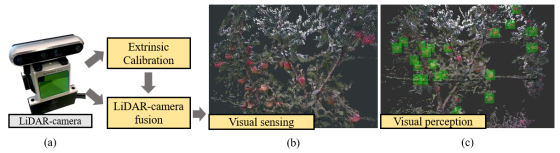
Congratulations to Hanwen and Xing on the acceptance of “ Accurate Fruit Localisation using High-Resolution LiDAR-Camera Fusion and Instance Segmentation ” by the Journal of Computers and Electronics in Agriculture! This co-first authored research work introduces a LiDAR-camera fusion-based visual sensing and perception strategy to perform accurate fruit localisation in apple orchards. The point clouds and colour images are fused to perform fruit localisation using a one-stage instance segmentation network. In addition, comprehensive experiments show that LiDAR-camera achieves better visual sensing performance in natural environments. For details, please visit https://authors.elsevier.com/a/1f-PU_3qk2sAWs