A Novel Framework for the Analysis of Underactuated Fingers
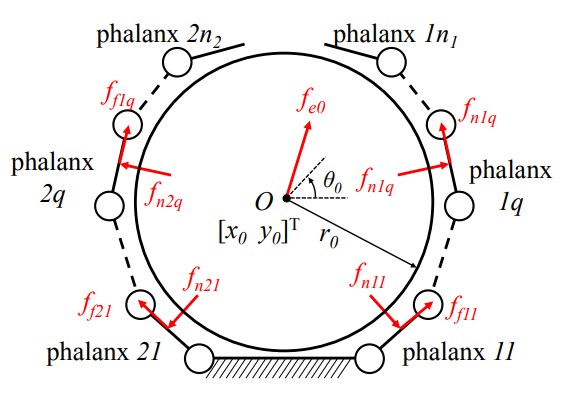
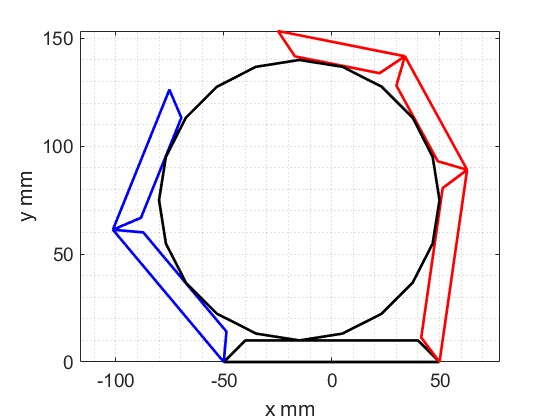
Congratulations to Shao for the acceptance of the manuscript "A Novel Framework for the Analysis of Underactuated Fingers" for publication in Mechanism and Machine Theory. This work discusses a framework for analysing the grasping configuration and forces of generalised multi-phalanx underactuated fingers on circular objects. The framework takes advantage of constraint analysis to achieve the autonomous generation of force-governing equations based on their kinematic counterparts. For ease of modelling different contact cases where the contacting phalanges differ, selection matrices are introduced, allowing the governing equations of all grasping cases to be derived from a master set that is associated with the full-contact case. The proposed framework was experimentally verified with a planar gripper comprising two-phalanx and three-phalanx fingers. For details, please check our paper via the following link: https://authors.elsevier.com/a/1gPbz,28z4XbOz