Development and Evaluation of a Robust Soft Robotic Gripper for Apple Harvesting
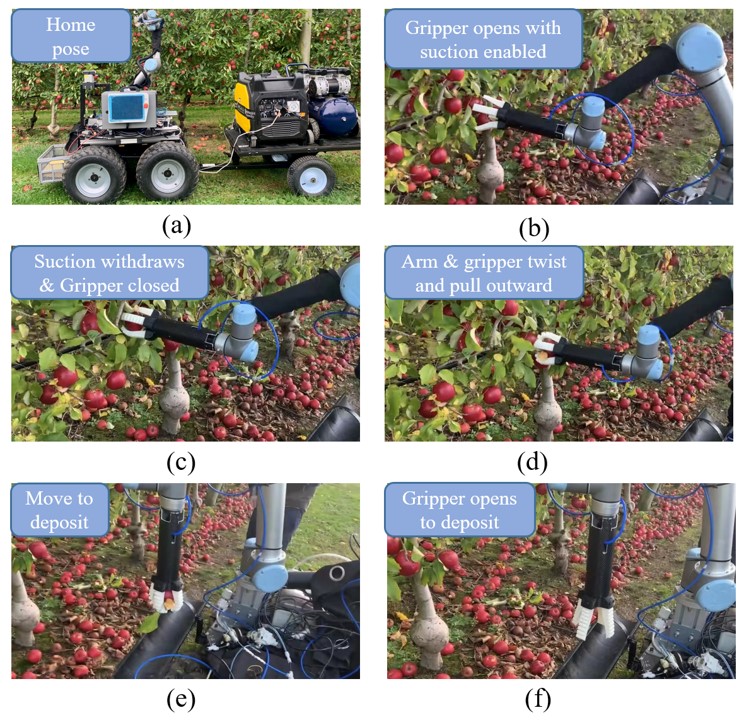
Congratulations to Xing, Hanwen and co-authors on the acceptance of “Development and Evaluation of a Robust Soft Robotic Gripper for Apple Harvesting ” by the Journal of Computers and Electronics in Agriculture! This co-first authored research work introduces a fruit harvesting method that includes a novel soft robotic gripper and a detachment strategy to achieve apple harvesting in the natural orchard. The soft robotic gripper includes four tapered soft robotic fingers (SRF) and one multi-mode suction cup. The multi-mode suction cup can provide suction adhesion force, show active extrusion/withdrawal, and present passive compliance mode. The simultaneously twist-pulling motion is finally proposed and implemented to detach the apples from the trees. The proposed robotic gripper is compact, compliant with apple grasping and evaluated in the natural orchard comprehensively. For details, please check our paper via the following link: https://authors.elsevier.com/a/1gFTwcFCSTfOQ