Research news
Postgraduate projects
Postgraduate projects for Master and PhD students are available.
The LMGA is interested in innovative and smart motion generation for versatile robotics applications powered by AI. Our goal is to benefit communities by means of advances in robotics and AI.
Please contact A/Prof Chao Chen (chao.chen@monash.edu) if you are interested or have any questions.
05 May 2023
Congratulations to Dr Hugh Zhou for successfully completing his PhD thesis examination, entitled "Adaptive Grasping with Tactile Sensing for Robotic Fruit Harvesting". His research investigated the factors causing inadequate performance of existing harvesting robots, and he proposed an innovative intelligent adaptive grasping method utilizing a patented suction-assisted fruit grasping technique and essential tactile sensing to improve interference handling in robotic fruit harvesting.
20 March 2023
The Monash Nova Rover team has recently launched the Pink Rover campaign, aiming to raise awareness about women in STEM and encourage younger generations to pursue careers in engineering. The team has painted their space rover pink and is taking it to compete in the Australian Rover Challenge on Thursday and the University Rover Challenge in the United States on May 31st. Co-leads Chloe Chang, Rebecca Leith, and Chief Technical Officer Jess Hepworth have shared their plans for the upcoming competitions. We wish them the best of luck in their endeavours, and those interested can learn more about the Monash Nova Rover team on their website.

20 March 2023
The research paper "The Monash Apple Retrieving System" by the MARS team was recently listed on SSRN's Top Ten download list for: AgriSciRN: Agricultural Technology (Topic) and Agriculture Engineering eJournaltop. Well done MARS team! As of 20 March 2023, this paper has been downloaded 30 times. You may view the abstract and download statistics at: https://ssrn.com/abstract=4272682.
16 March 2023
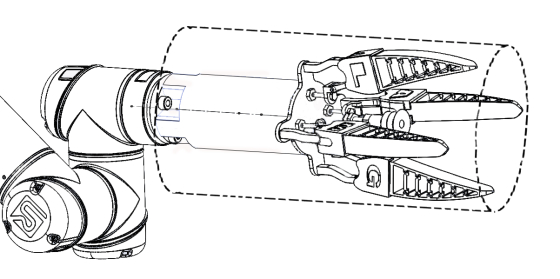
Congratulations to Dr Zijue Chen and the team for publishing their work "Exploring optimal adaptive process parameters for curved infill paths of additively manufactured carbon fibre reinforced polymers" on Composites Communications! In this paper, we proposed a vision-based measure algorithm with two custom metrics to quantitatively evaluate two typical defects: misalignment and twist, in the ME-based CFRP fabrication process and explored the effects of four printing parameters on the defects under different path radii for co-extrusion-based process with Taguchi method.
08 March 2023
Congratulations to Charles for receiving an Excellent Pass Report for his PhD Thesis. His thesis title is "Design and Modelling of Tendon-Driven Continuum Robots Based on Pseudo-Rigid Body and Constraint Analysis". His research involved developing a novel continuum robot design and a new modelling model based on the constraint analysis method.

08 March 2023
A/Prof Chen attended the panel discussion organised by Robogals Monash on International Women's Day to interact with Y11 and Y12 female students and inspire them to study STEM. A/Prof Chen encourages more women in STEM to achieve gender balance.


06 March 2023
Our Monash Nova Rover Team inspired the next generation for STEM and space exploration at Avalon Air Show 2023, and handed out over 1000 stickers to kids. The Pink Rover encouraged more women and girls into STEM to create a bright future for everyone.




12 February 2023
The research paper "The Monash Apple Retrieving System" by the MARS team has made the top 5 most downloaded preprint papers in AgriSciRN: Agricultural Techniques! Although it is still currently being peer-reviewed, it is excellent to see the level of interest in our work. Well done MARS team! You may download the preprint manuscript here.
08 February 2023
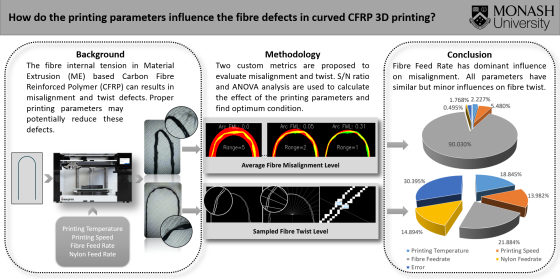
Congratulations to Hugh and the co-authors on the acceptance of “Branch Interference Sensing and Handling by Tactile Enabled Robotic Apple Harvesting” by the Journal of Agronomy! This research work proposed a tactile-enabled robotic grasping method combining deep learning, tactile sensing, and soft robots. By integrating fin-ray fingers with embedded tactile sensing arrays and customised perception algorithms, the robot gains the ability to sense and handle branch interference during the harvesting process and thus reduce potential mechanical fruit damage. For details, please visit: https://www.mdpi.com/2073-4395/13/2/503
01 February 2023
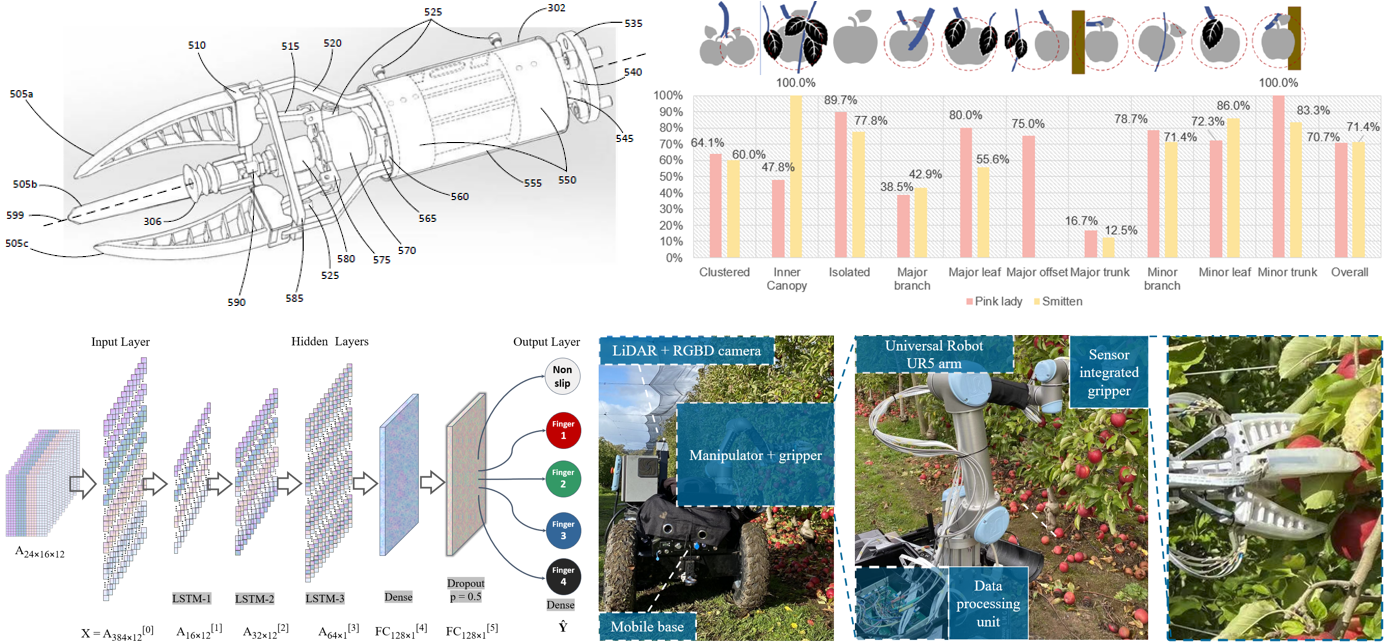
Congratulations to the Monash Apple Retrieving System (MARS) team (A/Prof. Chen, Hugh, Xing, Wesley) on their patent "Robotic fruit harvesting system and method" being filed and entering the PCT (Patent Cooperation Treaty) stage!
18 January 2023
13 January 2023
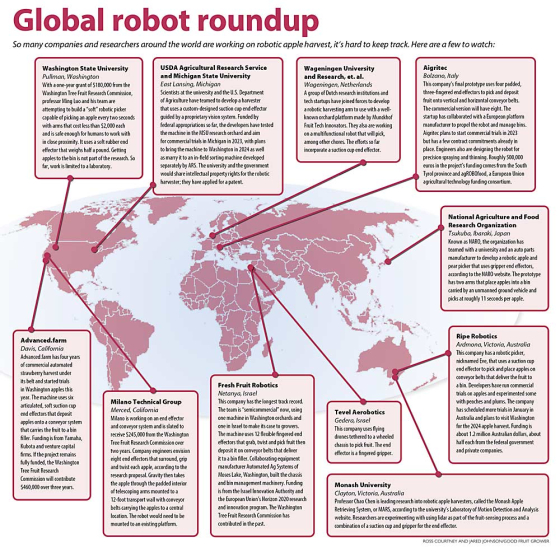
The world renowned horticultural magazine -- Good Fruit Grower has listed A/Prof. Chao Chen and the Monash Apple Retrieving System team as one of the 11 major robot developers around the world. Congratulations to the team! For details, please visit: https://www.goodfruit.com/lots-of-bots-video/
07 January 2023
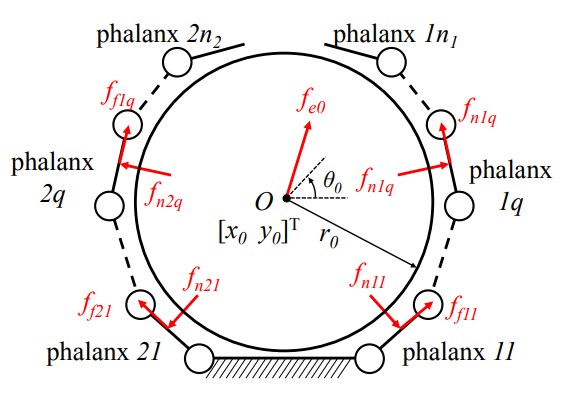
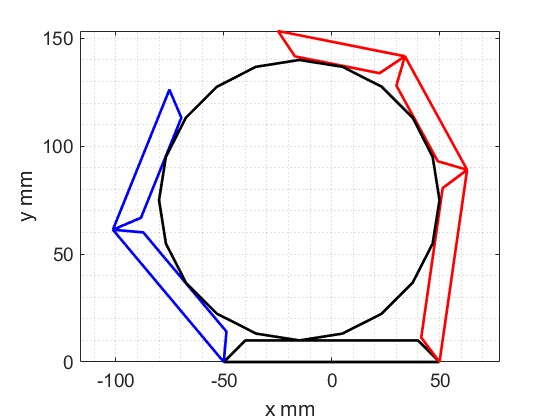
Congratulations to Shao for the acceptance of the manuscript "A Novel Framework for the Analysis of Underactuated Fingers" for publication in Mechanism and Machine Theory. This work discusses a framework for analysing the grasping configuration and forces of generalised multi-phalanx underactuated fingers on circular objects. The framework takes advantage of constraint analysis to achieve the autonomous generation of force-governing equations based on their kinematic counterparts. For ease of modelling different contact cases where the contacting phalanges differ, selection matrices are introduced, allowing the governing equations of all grasping cases to be derived from a master set that is associated with the full-contact case. The proposed framework was experimentally verified with a planar gripper comprising two-phalanx and three-phalanx fingers. For details, please check our paper via the following link: https://authors.elsevier.com/a/1gPbz,28z4XbOz
05 January 2023
Congratulations to Charles and Shao for the acceptance of "Modelling of Tendon-Driven Continuum Robot Based on Constraint Analysis and Pseudo-Rigid Body Model" for publication in IEEE Robotics and Automation Letters. This work investigates the internal force interaction between the actuation tendons and the flexible backbone of a planar continuum robot via the constraint analysis method. The method systematically derives all the relevant governing equations required for the system, and can efficiently solve for the direct and inverse kinetostatic models with either forces or displacements as the actuation inputs. We validate the proposed CA method using numerical simulation of a benchmark model and experimental data.

19 December 2022
Congratulations to Dr Keenan Granland for his PhD thesis has been certified. His thesis title is "Study of Manipulation and Sensing Technology for Horticulture Environments". The work involved development of a novel translational parallel mechanism for manipulation and development of a minimalist method for creating sensing neural networks.

15 December 2022
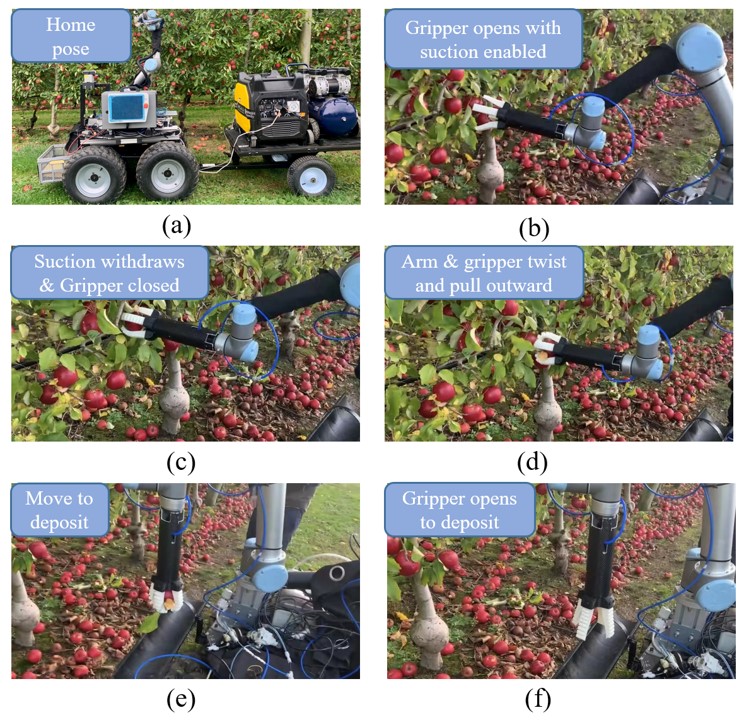
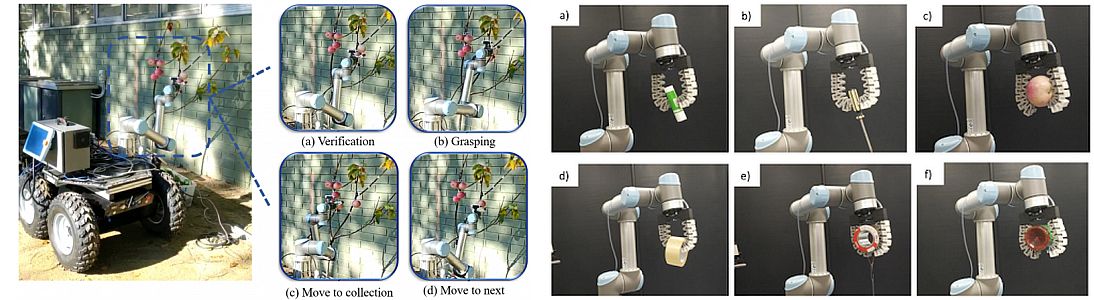
Congratulations to Xing, Hanwen and co-authors on the acceptance of “Development and Evaluation of a Robust Soft Robotic Gripper for Apple Harvesting ” by the Journal of Computers and Electronics in Agriculture! This co-first authored research work introduces a fruit harvesting method that includes a novel soft robotic gripper and a detachment strategy to achieve apple harvesting in the natural orchard. The soft robotic gripper includes four tapered soft robotic fingers (SRF) and one multi-mode suction cup. The multi-mode suction cup can provide suction adhesion force, show active extrusion/withdrawal, and present passive compliance mode. The simultaneously twist-pulling motion is finally proposed and implemented to detach the apples from the trees. The proposed robotic gripper is compact, compliant with apple grasping and evaluated in the natural orchard comprehensively. For details, please check our paper via the following link: https://authors.elsevier.com/a/1gFTwcFCSTfOQ
18 November 2022
A/Prof Chen gave a plenary speech on the Monash Apple Retrieving System (MARS) at the Interpoma Congress in Bolzano, and also participated in the Round Table Discussion about the future of robotic harvesting.



17 October 2022
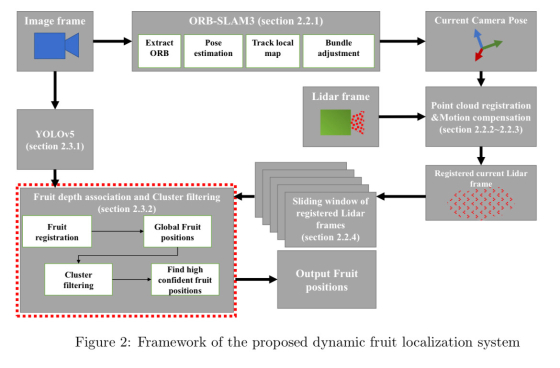
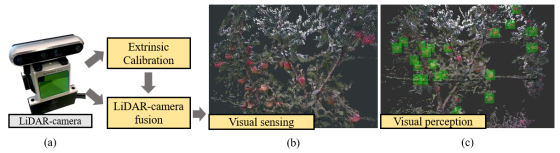
Congratulations to Hanwen and Xing on the acceptance of “ Accurate Fruit Localisation using High-Resolution LiDAR-Camera Fusion and Instance Segmentation ” by the Journal of Computers and Electronics in Agriculture! This co-first authored research work introduces a LiDAR-camera fusion-based visual sensing and perception strategy to perform accurate fruit localisation in apple orchards. The point clouds and colour images are fused to perform fruit localisation using a one-stage instance segmentation network. In addition, comprehensive experiments show that LiDAR-camera achieves better visual sensing performance in natural environments. For details, please visit https://authors.elsevier.com/a/1f-PU_3qk2sAWs
15 September 2022
Congratulations to Hugh and the robotic apple harvesting team on getting their work included in Encyclopedia. For details, please visit https://encyclopedia.pub/video/video_detail/422

21 July 2022
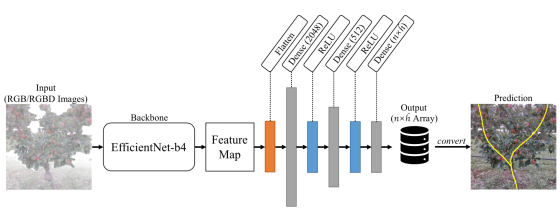
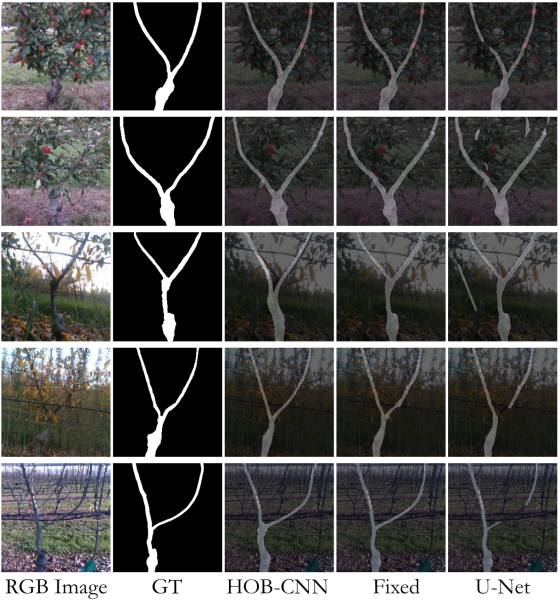
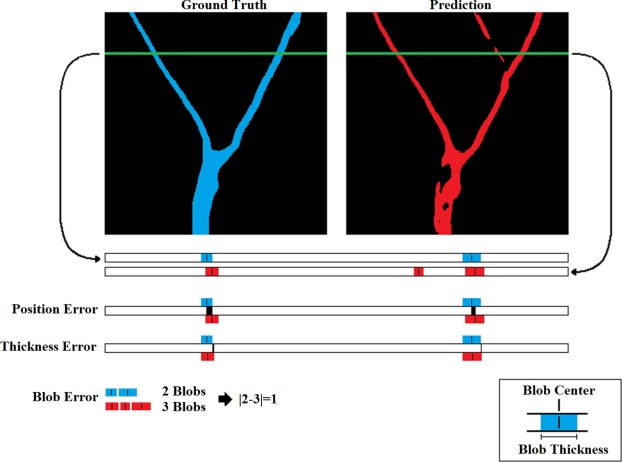
Congratulations to Zijue, Keenan and the team on the acceptance of “HOB-CNN: Hallucination of Occluded Branches with a Convolutional Neural Network for 2D Fruit Trees ” by Smart Agricultural Technology! The paper proposed a novel regression neural network to detect continuous 2D fruit tree branches for the first time.
20 July 2022
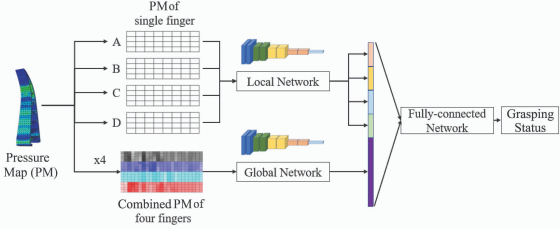
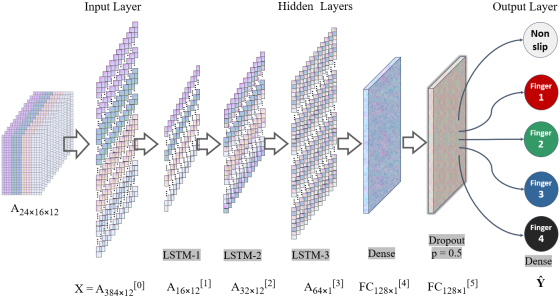
Congratulations to Hugh and the coauthors on the acceptance of “ Learning-based Slip Detection for Robotic Fruit Grasping and Manipulation under Leaf Interference ” by the Journal of Sensors! This research work identified the connection between leaf interference and inadequate harvest performance and demonstrated the great potential of learning-based fruit grasping and manipulation.
06 July 2022
Congratulations to Dr Zijue Chen for her PhD thesis has been certified. Her thesis title is "Development of A Deep Learning Based Machine Vision System for Occluded 2D Fruit Trees". The research work developed a vision system for predicting completed tree branches under occlusion scenarios.
06 June 2022
Congratulations on the Award of Second Place for our Monash Nova Rover Team in the 2022 International University Rover Challenge at the Mars Desert Research Station in Utah.

03 June 2022
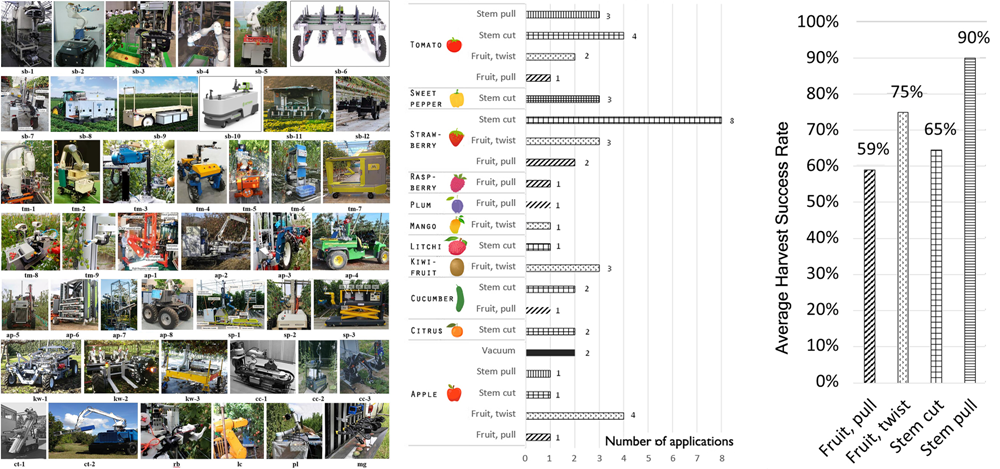
Congratulations to Hugh, Xing, Wesley and the coauthors on the publication of “Intelligent robots for fruit harvesting: recent developments and future challenges” by the Journal of Precision Agriculture. For details, please visit https://link.springer.com/article/10.1007/s11119-022-09913-3
03 June 2022
Congratulations to our MARS research team on completing another successful harvesting field test at Fankhauser Apples.
27 May 2022
Our harvesting robot is reported by Future Farm.

22 May 2022
Congratulations to our MARS research team on completing another successful harvesting field test at Fankhauser Apples.
18 May 2022
Our Monash Apple Retrieving System (MARS) is on the Weekly Times!

05 May 2022
Y-shaped Tree Dataset for Tree Branch Prediction
This dataset includes 435 RGB-D Y-shaped Pink Lady apple trees with three types of label: Position Annotation, Visible Branch Annotation and Whole Branch Annotation. 103 images are from summer (heavily occluded), 89 images are from autumn (medium occluded) and 243 images are from winter (no occlusion).
To download, please visit https://drive.google.com/file/d/1-6akVXezq26ihtDrVH9czGUQDFd8Py81/view?usp=drive_web
Personnel - Ms Zijue Chen (PhD student), Dr Chao Chen (contact person)

04 May 2022
Congratulations on the Grand Opening of the fantastic facility of Monash Robotics!
14 April 2022
Congratulations to Hanwen, Hugh, and Xing for the article ‘Real-Time Fruit Recognition and Grasping Estimation for Robotic Apple Harvesting’ being awarded “Editor’s Choice Article”.

01 April 2022
Our Monash Nova Rover Team is on the mission to Moon!

26 March 2022
Congratulations to the Research Team of Harvesting Robot, Wesley, Hugh, and Xing, for the successful demonstration at the Smart Farm in Tatura, as invited by Launch Victoria and Agricultural Victoria.6

19 March 2022
Congratulations to Dr Xing Wang for completing his PhD thesis examination. His thesis title is “Soft Robotic Fingers and Vision Guidance Based on Deep Learning”. This research mainly consists of 2 parts: Part 1 investigates the advanced mechanisms applied to soft robotic fingers for grasping purposes, while Part 2 focuses on vision-based sensing via deep learning to guide the robotic grasping in the complex agricultural environment.
08 February 2022
Congratulations to Keenan and the coauthors on the acceptance of “Detecting occluded Y-shaped fruit tree segments using automated iterative training with minimal labeling effort” by the Journal of Computers and Electronics in Agriculture. For details, please visit https://authors.elsevier.com/a/1eXb-cFCSTdS3
14 January 2022
Congratulations to Xing, Hanwen, and the coauthors on the acceptance of “Geometry-Aware Fruit Grasping Estimation for Robotic Harvesting in Apple Orchards” by the Journal of Computers and Electronics in Agriculture.
View the news archive for 2014 - 2021.