Archive news - 2014 - 2021
2021
15 December 2021
Welcome Kieran and Lan from the Victorian Agricultural Research Centre to visit LMGA.
14 December 2021
End-of-year photo of Monash Nova Rover Team. Another successful year for the team!

05 December 2021
Celebration of the end of 2021, and all the achievements made by LMGA members!

12 November 2021
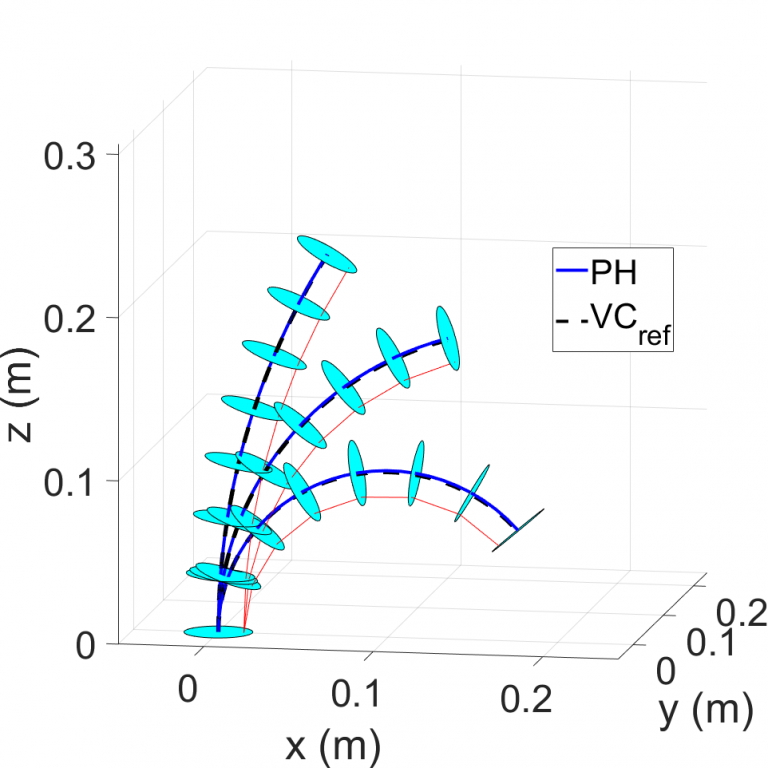
Congratulations to Charles on the acceptance of “Modeling of Tendon-Driven Continuum Robot Based on Pythagorean Hodograph (PH) Curve and Control Polygon” by the Australasian Conference on Robotics and Automation (ACRA).
23 September 2021
Congratulations to Xing and the coauthors on the acceptance of “Bio-inspired soft bistable actuator with dual actuations” by Journal of Smart Materials and Structures.
16 September 2021
Congratulations to Hanwen for his first-authored paper receiving the 2020 Superior Paper Award, issued by Computers and Electronics in Agriculture, a prestigious journal in agriculture robotics. The paper is “Fruit Detection, Segmentation and 3D Visualisation of Environments in Apple Orchards”.
28 July 2021
Dr. Chao Chen is invited to give a plenary presentation in APAL Forum 2021, about the Monash Apple Retrieving System (MARS) which works autonomously, identifying fruit, avoiding obstacles, and self-driving through the orchard rows during harvesting. For details, please visit https://apal.org.au/life-in-mars-the-monash-robotic-apple-picker/.
07 May 2021
Congratulations to our apple harvesting team, Wesley, Hugh, Xing, and Hanwen, for the great success of the field tests in Fankhauser Apples. The contributions by our apple thinning team, Keenan, Zijue, and Rhys, are also appreciated. Our harvesting robot got a name now: MARS (Monash Apple Retrieving System). ABC News report on MARS is here: https://amp.abc.net.au/article/100107796. Nine News report is below. Other media coverages include Newatlas, Australian Manufacturing, Stock Journal, Agtrader, Farmers Journal, The Land, and more.
09 April 2021
Congratulations to our Monash Nova Rover Team’s success in the Australian Rover Challenge 2021, organised by University of Adelaide. Our team won First Place after completing four lunar challenges.

03 February 2021
Congratulations to our Monash Nova Rover Team to achieve the Honourable Mention by NASA in the Honey, I Shrunk the NASA Payload Challenge.
https://www.herox.com/NASAPayload2/updates

2020
23 December 2020
Congratulate Zijue Chen, David Ting and Rhys Newbury for their publication of “Semantic Segmentation for Partially Occluded Apple Trees Based on Deep Learning” in Computers and Electronics in Agriculture.

10 December 2020
Congratulations to Dr Ao Xi for his achievement of his PhD degree and excellent publications during the study!

8 December 2020
Celebration of the end of 2020, a very challenging year, and all the achievements made by LMGA members!

12 October 2020
Congratulations to the Robotic Transverse Profiler (RTP) team members: Michael Stanley, Logan Vesty, Kee Ching Tee, Richard Chen supervised by Dr Chao CHEN on the nomination for the Research-Industry Partnership Award at this year “National Transport Research Awards”. RTP is an instrumental robot for high precision pavement measurement developed by LMGA under a collaboration project the Nanocomm hub and ARRB. The robot maintains in active service since its commissioning in 2016.
30 September 2020
Congratulations to Hanwen, Hugh & Xing for their research paper, “Real-Time Fruit Recognition and Grasping Estimation for Robotic Apple
Harvesting”, accepted for publication in Sensors. This paper proposed a light-weight one stage instance segmentation network to perform fruit detection and instance segmentation. Besides, a modified PointNet network was designed and implemented to perform fruit modeling and grasping estimation with point clouds from an RGB-D camera. The aforementioned two networks were applied to the design and build of an accurate robotic system towards autonomous fruit harvesting. Robotic harvesting experiments in both indoor and outdoor conditions are also included to validate the performance of the developed harvesting system. Experimental results show that the developed vision method can perform highly efficient and accurate to guide robotic harvesting.
10 September 2020
Keenan presented his work on New family of Translational Parallel Manipulators with Scissor Mechanisms in the 4th International Conference on Fundamental Issues, Applications and Future Research Directions for Parallel Mechanisms/Manipulators/Machines.
25 August 2020
Congratulations to Dr Hanwen Kang for completing his PhD thesis, with the title of Deep-Learning in Fruit Detection and Segmentation for Harvesting Robots. This thesis investigates the most advanced computer vision techniques which are used in object detection, tracking and image segmentation. These techniques are further studied and applied in a robotic harvesting robot, which can perform automatic target recognition, working space understanding, and crop harvesting.
24 August 2020
Congratulations to Xing Wang and Aarjav Khara for their research paper, “A soft pneumatic bistable reinforced actuator bioinspired by Venus Flytrap with enhanced grasping capability“, published on Bioinspiration & Biomimetics. This paper proposes a novel soft pneumatic bistable reinforce actuator (PBRA) design, which is bio-inspired by Venus Flytrap’s bistable mechanism allowing for the storage of elastic energy. The proposed design consists of two asymmetric 3D-printed chambers that are attached to a central prestressed steel shell to achieve bistability. By applying this bio-inspired bistable property into the soft pneumatic actuator, the performance in terms of the actuation speed, blocked tip force, load-carry capacity and stiffness has been significantly improved. A two-finger soft robotic gripper is finally designed, manufactured and experimentally validated to demonstrate its performance in grasping the objects with different contours and weights.
12 August 2020
Congratulations to Xi Ao for his latest research paper, ” Stability Control of a Biped Robot on a Dynamic Platform Based on Hybrid Reinforcement Learning “, published on Sensors. The paper proposes a Hybrid Reinforcement Learning scheme and applies it to a biped robot to maintain balance on a rotating platform. This novel reinforcement learning (RL) scheme successfully establishes a serial connection between the model-based and model-free RL framework. In the beginning, a model-based estimator is utilized to predict the dynamics model of the system and provide initial control input, after which the reduced action space is obtained by minimizing the immediate cost of reaching the desired stable state. Finally, a model-free optimizer based on DQN(λ) is introduced to fine tune the policy. The proposed approach successfully reduced the computational load and improved the sample efficiency. Simulation results show that the biped robot is able to maintain balance on a rotating platform and adapt to different rotating magnitudes and frequencies.
11 August 2020
Congratulation to Xi Ao for his new research paper, “Walking Control of a Biped Robot on Static and Rotating Platforms Based on Hybrid Reinforcement Learning”, published on IEEE Access. The paper introduces a Hybrid Reinforcement Learning framework and applies it to a biped robot to generate stable walking gaits on both static and rotating platforms. The framework consists of a Hierarchical Gaussian Processes based model-based reinforcement learning part as the off-line Estimator, an Actor Network Pre-training scheme, and a Deep Deterministic Policy Gradient based model-free policy optimizer. The proposed framework improves sample efficiency during the learning process and guarantees the adaptability of the biped robot to platforms with different angles, different magnitudes, and different frequencies.
15 July 2020
Congratulations to the Monash Nova Rover Team to win the second place out of 132 teams in NASA Challenge!
03 July 2020
Congratulations to Dr Godfrey Keung for the achievement of his PhD degree and excellent publication during the study!
02 April 2020
Congratulate Hanwen & Hugh for the publication of “Visual Perception and Modelling for Autonomous Apple Harvesting” in IEEE Access
20 March 2020
Congratulate Hanwen & Hugh for the publication of “Visual Perception and Modelling for Autonomous Apple Harvesting” is IEEE Access
2019
13 December 2019
Celebration of the end of 2019 and all achievements by LMGA members!

04 December 2019
Congratulate Hanwen for the publication of “Fast Implementation of Real-time Fruit Detection in Apple Orchards” in Computers and Electronics in Agriculture.
03 December 2019
Dr Chen was invited to give a plenary talk in the second ANZ Smart Farms and AgTech Forum.

02 September 2019
Automated Apple Picking Robot
Across the world, the costs of labour are increasing while those for robotic systems are reducing. Apple orchards require a great deal of maintenance throughout the year, including harvesting tasks.
By mechanising and automating the process of harvesting (picking) fruits, it may be possible to reduce costs and increase production and quality. A light, swift, intelligent and efficient robot for harvesting apples was developed, by focusing on three important subsystems, mechanical (gripping and manipulation), vision detection and control. The system is to be mounted on an automated vehicle developed by Thor Tech. Currently, each system is being validated to meet its own specific requirements. Successful indoor testing has validated the concept design, gripping, vision and control systems. With each iteration, each subsystem is being improved.
Personnel - Mr Keenan Granland (PhD student), Mr Hanwen Kang (PhD student), Mr Rhys Newburym (Research Engineer), Mr Hugh Zhou (PhD student), Ms Zijue Chen (PhD student)

02 September 2019
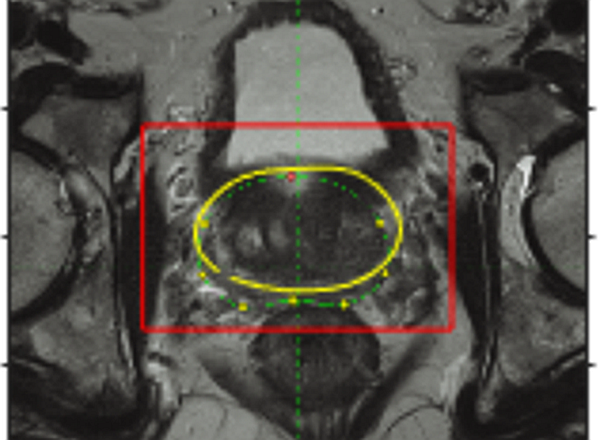
Deep-Learning-Based Prostate Cancer Detection
3Accurate detection of cancer region from the MRI/ultrasound images and segmentation of the prostate contour is critical for the diagnosis of prostate cancer. However, the process is very demanding on the urologist’s expertise. An autonomous image processing technique is desired to promote the diagnosis and thus the treatment outcomes.
A solution based on a neural network is proposed to achieve autonomous prostate segmentation and cancer detection. A Deep-Convolution Neural Network was developed as the backbone of the solution for improved accuracy and reduced inference time. Experiments were conducted in which medical images were fed to the proposed processor and the outcomes were compared to the ground truth labelled by experienced urologists. The functioning of the proposed solution was successfully verified.
Personnel - Mr Hanwen Kang (PhD student)
02 September 2019
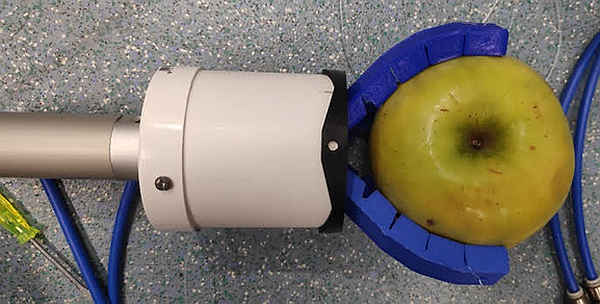
Adaptive Fruit Gripper
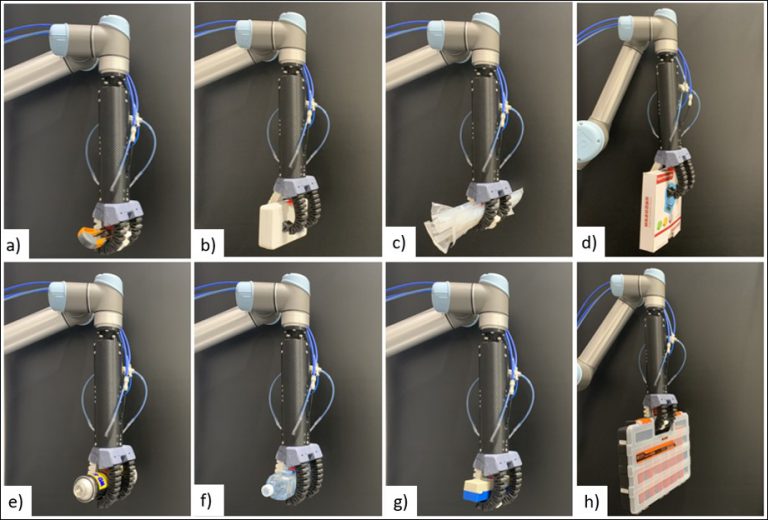
With automation increasing all industries, the need for new adaptive grippers for the use in complex and dynamic environments is increasing. Handling fruit can be a complicated task due to the natural variations in shape and size of each fruit, in addition for the task of automated harvesting the complexity of the task and potential for error is increased.
Using printed tendon driven fingers and a mechanism that connects them together, a simple yet effective adaptive gripper has been developed. The mechanism only requires one pneumatic actuator, the mechanism connecting the tendons adapts to the shape and size of the object and contact pressure can easily be controlled by regulating the operating pressure. Many iterations of this gripper have been developed, tested and validated for the application of apple picking, with the aim of maximising grasping workspace to account for any errors in the robotic system or variance between fruits.
Personnel - Mr Keenan Granland (PhD student)
31 May 2019
Congratulations to our Monash Nova Rover team for achieving the 9th position among the 36 final teams at the Mars Desert Research Centre, and 86 teams participating this challenge around the world. The achievement was reported by ABC News, Channel9 News, and BBC News.
The full story can be found at: https://www.monash.edu/engineering/about-us/news-events/latest-news/articles/2019/nova-rover-team-take-on-the-university-rover-challenge
26 May 2019
The Monash LMGA Team made a great successful show of our developed Apple Harvesting Robot in the Global AI Product and Application EXPO in Suzhou, China. Our work was reported by the CCTV News.

26 May 2019
Our Monash Nova Rover team is going to the 2019 University Rover Challenge! The team members were interviewed by 9NEWS.
26 May 2019
Robotic Hand Prostheses
Hand loss leads to a significant reduction in functionality and psychological issues, which could be compensated by hand prostheses. Existing hand prostheses suffer high patient rejection rate due to lack in functionality (grasping force and control), aesthetic appearance and the ability to produce anthropomorphic motion.
3D printed hand prostheses are proposed, featuring a novel linkage finger architecture for improved grasping force and a haptic feedback system for intuitive grasping control. The linkage finger is developed based on a unique epicyclic kinematic chain optimised to compensate for low-strength 3D printed components. The haptic feedback system utilises thin-film sensors for sensing and micro-vibration-motors for skin stimulation. The prostheses were clinically tested on young and adult patients. The team was granted 2017 Amy Geach Hand Therapy Innovation Award for the project.
Personnel - Ms Zijue Chen (PhD student), Mr Aarjav Khara (PhD student), Dr Shao Liu (past student, current postdoctoral fellow)
26 May 2019
Robotic Transverse Profiler (RTP)
Profiling the surface is a crucial process in studying the material property of a road pavement. Accurate profiling is time-consuming and labour intensive in the preparation, setup and operation of all the relevant equipment.
Autonomous data logging over the pavement surface can greatly improve productivity by reducing the time and effort spent on setting up and operating the profiling equipment. A crawler robot was developed with state-of-the-art sensors to track its path and the data logging. Both the repeatability and the resolution of the data is within the millimeter scale. The data taken by the RTP was compared with the previous system, which set the standard of the pavement study. It has been proven that the data taken by RTP is consistent with the previous standard and has high repeatability, hence it is adapted as the new standard for profiling pavement surface.
Personnel - Mr Michael Stanley (PhD student)

2018
16 November 2018
Prof Liu, the Director of CAS at UTS, visited the LMGA at Monash and gave a talk.
02 October 2018
Welcome Prof Jorge Angeles at McGill to visit Monash University and LMGA.

15 August 2018
Congratulations! Godfrey Keung’s provisional patent enters PCT phase.
17 July 2018
Mr Ao Xi successfully passed his PhD confirmation exam.
Mr YangJunJie Wang successfully passed his research master confirmation exam.
06 July 2018
Year 8 ChallENGe workshop hosted by LMGA of the humanoid robot programming workshop for the Department of Mechanical and Aerospace Engineering.
28 June 2018
Congratulations to our Nova Rover’s success in the 2018 Global Rover Challenge in Utah.
14 June 2018
Welcome Prof Antony Hodgson at UBC to visit the LMGA.
03 June 2018
Mr Godfrey Keung successfully conducts the experiment of knee exoskeleton on the treadmill.

06 June 2018
Robotic Transverse Profiler (RTP)
Profiling the surface is a crucial process in studying the material property of a road pavement. Accurate profiling is time-consuming and labour intensive in the preparation, setup and operation of all the relevant equipment.
Autonomous data logging over the pavement surface can greatly improve productivity by reducing the time and effort spent on setting up and operating the profiling equipment. A crawler robot was developed with state-of-the-art sensors to track its path and the data logging. Both the repeatability and the resolution of the data is within the millimeter scale. The data taken by the RTP was compared with the previous system, which set the standard of the pavement study. It has been proven that the data taken by RTP is consistent with the previous standard and has high repeatability, hence it is adapted as the new standard for profiling pavement surface.
Personnel - Mr Michael Stanley (PhD student)
28 May 2018
Welcome Prof Stephane Caro and Prof Maxime Gautier at Laboratory of Digital Sciences in Nantes to visit LMGA.

24 May 2018
Congratulations to Ms Zixi Liu for her award of The Excellence in Robotics!
23 April 2018
Dr Shao Liu successfully completed and validated analysis of a four-state epicyclic gearbox based on constraint analysis approach.
Mr Keenan Peter Granland successfully detect apples by means of neural network.
16 April 2018
Ms Zijun Chen Successfully 3D printed a linkage-based finger.

Mr Hanwen Kang Successful experiments of new algorithm on Lumbar Vert model.
Mr Keenan Peter Granland successfully detect apples by means of neural network.
14 April 2018
Biped Robot Control Based on Reinforcement Learning
Reinforcement Learning (RL) is recently introduced to biped robot control for improved balancing performance against complex external disturbances that cannot be modelled. Existing model-based RL and model-free RL approaches are both demanding in computational resources and are of low computational efficiency when handling high-degree-of-freedom biped robots.
It is possible to develop a new RL algorithm that utilises the advantages of model-based and model-free RL to reduce the convergence time while retaining the asymptotic stability. The proposed RL algorithm was developed, in which model-based RL is used for offline training to obtain a rough model of the system, and the model-free RL is used to fine-tune the policy. Simulations were conducted with a NAO biped robot on a rotating platform, and the proposed RL algorithm was proven to be able to maintain the balance of the robot.
Personnel - Ao Xi (PhD student)
14 April 2018
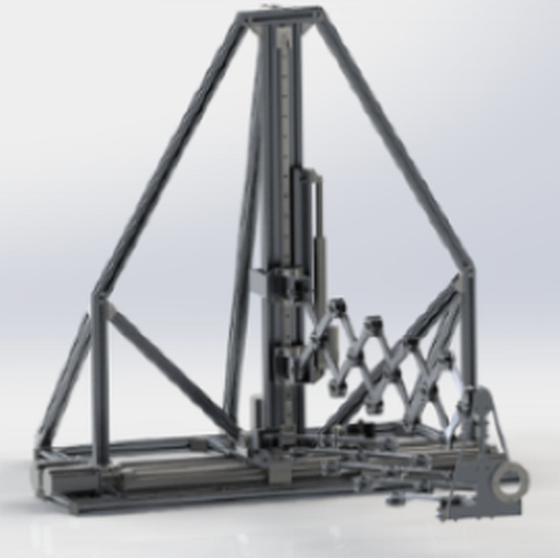
Scissor Translational Parallel Manipulator (STPM)
Translational Parallel Manipulators (TPM) have platforms that are constrained to not rotate and have high speeds and accuracies, making them useful for 3d printing, manufacturing, assembly and logistic applications. However, the structure of parallel mechanisms results in all arms connecting to a single platform which greatly reduces the workspace of the mechanism.
A novel TPM is proposed which uses scissor mechanism in the arms as a means to increase the size of the workspace and at the same time achieve translational motion with a design that allows for any base shape and size. The design and kinematics for many different configurations, including a triangular base (delta), square base and open base, were derived and simulations confirmed the kinematics of each of the designs. A small unactuated prototype in the triangular (delta) configuration was developed which validated the translational motion and passive workspace.
Personnel - Keenan Granland (PhD student)
14 April 2018
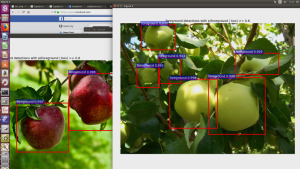
Deep-Learning-Based Apple Recognition and Positioning
Detection and positioning of the fruits is the first step in autonomous harvesting. Locating the fruit at outdoor light is a challenge for the vision system, especially the active systems. Passive vision systems, however, require extra matching algorithms which increase the detection errors. Judging whether a target fruit is pickable or not is highly depends on manipulator and environment, which is also under intensive research.
Bypassing the matching algorithm can reduce the error and thus increase the success rate of the passive vision system in the outdoor environment. A multi-camera passive vision system was developed without a matching algorithm. New neural networks and algorithms were implemented to judge whether a target apple is suitable for picking. For verification, a quad-camera vision system was built and tested. The functioning of the system was successfully proven.
Personnel - Ms Zijue Chen (PhD student)

14 April 2018
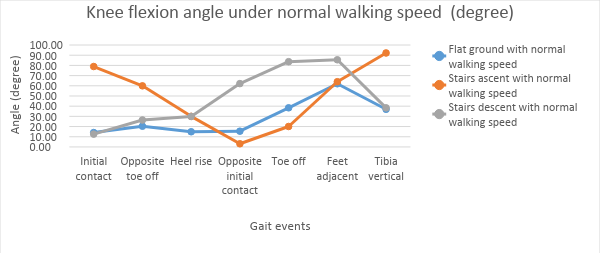
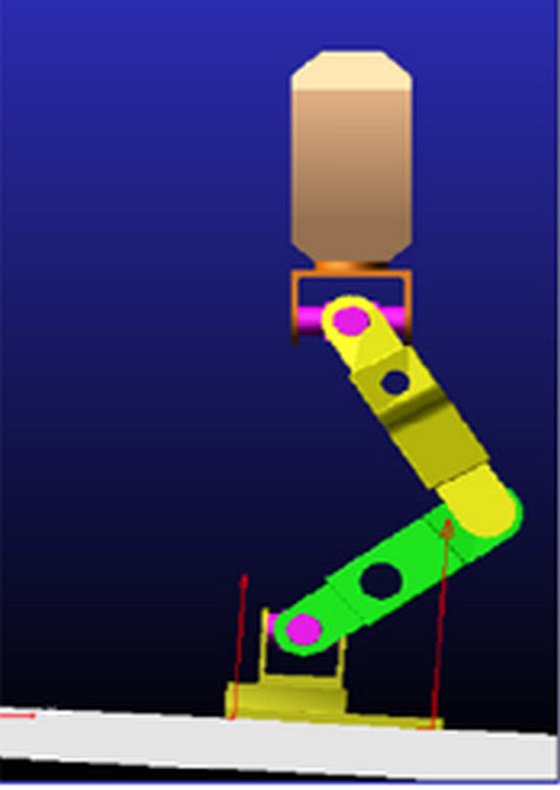
Robotic Knee Exoskeleton for Rehabilitation
Musculoskeletal disorders and orthopaedic injuries on the knee joint is common. Knee exoskeletons can assist patients with weakened knee muscles in daily activities. Current passive and quasi-passive exoskeletons are limited in certain activities due to the characteristic of the mechanism. The versatility of the device needs to be improved to be more practical.
A novel quasi-passive exoskeleton is proposed to unload the knee joint and provide auxiliary forces in daily activities. The exoskeleton is based on the spring/damper mechanical behaviour of a unique brake-cable mechanism. The spring behaviour is used in level walking and the damper behaviour is used in walking downstairs and sitting. Inertia Measurement Units (IMUs), load cells and an intelligent gait phase detection algorithm are used for the control of exoskeleton. The prototype was tested with healthy subjects to measure the output auxiliary torque to the user’s knee in level walking, sitting and walking downstairs.
Personnel - Mr Godfrey Keung (PhD)

In-Bore MRI-Guided Prostate Biopsy Robot
Prostate cancer is one of the most common cancers in men and biopsy is the gold standard for prostate cancer diagnosis. Existing ultrasound-guided biopsy procedures suffer inaccuracy due to the need for image fusion and target projection.
Biopsy guided directly by MRI image eliminates the errors associated with image fusion and target projection. To enable in-MRI biopsy, a novel biopsy robot based on dual triangular linkage (DTL) was developed. Its unique architecture allows collision-free operation within the confined MRI tunnel while improving patient safety. A prototype is under development and will be tested experimentally in MRI tunnel.
Personnel - Dr Shao Liu (past student, current postdoctoral fellow)
Thesis - Design and Modelling of Robots for Minimally Invasive Surgery

2017
15 December 2017
Monash LMGA successfully organised the Summer Summit of Screw Theory at Clayton Campus with University of Genova under the sponsorship of IEEE and ARC Nanocomm ITRH.
13 December 2017
Concentric Tube Robots (CTR)
Concentric tube robots are constantly bending, infinite DOF robots with elastic structures. They have distinct advantages in minimally-invasive surgical (MIS) applications. Kinematic models of the CTRs are computationally demanding and inefficient.
The direct kinematic modelling of the concentric tube robots was investigated, leading to a new computationally efficient model based on advanced Cosserat rod theory. The model was proven through mathematical simulations to provide superior performance compared to the existing models. The model will serve as the backbone towards a fully generalised framework for modelling continuum robots of different architectures.
Thesis Title: - Design and Modelling of Robots for Minimally Invasive Surgery
Personnel - Dr Shao Liu (past student, current postdoctoral fellow)

13 December 2017
Path Planning of Parallel Manipulators
Path planning for parallel manipulators, especially for manipulators greater than three degrees of freedom (DOF) is a challenging task for many reasons. Due to the complicated nature of their kinematics and the dangerous effects of parallel singularities, path planning of these manipulators can be computationally expensive and often the side-effect is that the overall reachable workspace is constrained to a very small operational area.
A solution based on a novel concept of global workspace roadmap is proposed for systematic path planning of high-DOF parallel manipulators, which enhances the overall reachable workspace. Rotary disk search and flood-fill algorithms were developed for efficient trajectory planning within the global workspace roadmap. This novel path planning scheme was successfully applied on various parallel manipulators, including two-DOF 5R, three-DOF 3-RPR, three-DOF 3-RRR parallel robots and six-DOF Stewart-Gough platform.
Thesis Title - Path planning of parallel manipulators in configuration space
Personnel - Dr Wesley Au (past student)

13 December 2017
Monash Epicyclic Parallel Manipulator (MEPaM)
Haptic feedback is critical for precise remote operation of robotic systems as well as human-machine interaction in the virtual environment. Existing six-degree-of-freedom six-legged parallel haptic devices offer limited workspace and low transparency.
A solution to the aforementioned limitations is to implement three-legged parallel architecture for workspace and reduce the mass/inertia of the legs for transparency. A novel three-legged haptic device, MEPaM, was developed accordingly, featuring all-grounded actuators and cable transmission. The analysis revealed that MEPaM has the most transparent interaction and the largest transparency bandwidth irrespective of environmental stiffness. Comparison based on experiments demonstrated that MEPaM has a force and load capacity superior to the serial haptic devices.
Personnel - Dr Sajeeva Abeywardena (past student)
Thesis Title - The Monash Epicyclic Parallel Manipulator: a novel six-degree-of-freedom impedance-type haptic device.

13 December 2017
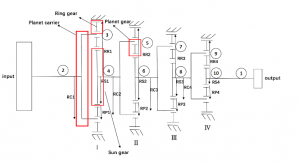
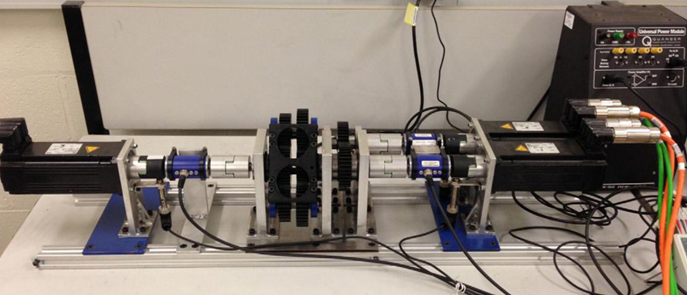
Power Flow Analysis of Epicyclic Gear Transmission
Epicyclic gear transmissions are widely used in various industrial applications including robotic arms, hybrid vehicle power transmissions and turbine generators. Analysing and enhancing the operational efficiency of gear transmissions are important to design optimisation and control.
A complete framework based on constraint analysis and virtual power was developed for the analysis of epicyclic gear systems. Power flow diagrams were constructed to obtain possible power flow patterns and to verify the balance of normal/virtual power flows within the system, based upon which the theoretical efficiency formulae were derived for the full working range. The predictions were experimentally verified with a prototype.
Personnel - Mr Jiabin Chen (past student)
10 December 2017
Reconfigurable Spherical Motion Generator (RSMG)
Flight simulators offer a risk-free and low-cost approach for training pilots. One major challenge of the existing motion bases of the flight simulators is the limited range of motion, which compromises the fidelity of the simulators and consequently the training outcomes.
The proposed solution, the reconfigurable spherical motion generator (RSMG), achieves unlimited spherical motion by utilising reconfiguration to avoid workspace singularity. The principle is to actively alter the manipulator’s configuration before being trapped into singular configurations. Robotic arms with reconfigurable architecture, arranged in a redundant parallel configuration, were designed to actuate the spherical rotor. An RSMG prototype was developed and demonstrated unlimited rotation around an arbitrary axis in 3D space.
Thesis Title: Reconfigurable Spherical Motion Generator
Personnel - Dr Stanley Ip (past student)

10 December 2017
Medical Robot with Remote Centre of Motion (RCM) Mechanism
Remote centre of motion (RCM) robots are constrained to rotate around a spatial point, making them ideal for robotic minimally invasive surgery for the fixture of incision ports and promotion of patient safety. Yet, existing RCM mechanisms have large device footprints, thus suffer extensive collisions when manipulated within confined workspaces near the incision ports.
A novel RCM mechanism, the dual triangular linkage (DTL), is proposed, featuring a unique four-bar linkage and parallelograms to minimise the device footprint. A prototype with two-degree-of-freedom RCM based on DTL was developed and validated the RCM function. Simulation indicated up to 35% reduction in device footprint and up to 80% reduction in weight compared to the parallelogram, which is the most widely deployed RCM mechanism on the RCM surgical robots.
Personnel - Dr Shao Liu (past student, current postdoctoral fellow)
Thesis - Design and Modelling of Robots for Minimally Invasive Surgery

2016
08 September 2016
Our paper, Path planning and assembly mode changes of 6-DOF Stewart-Gough-type parallel manipulators, is now published in Mechanism and Machine Theory.
03 September 2016
Congratulations to Shao for passing his pre-submission seminar: Design and Modelling of Robots for Minimally Invasive Surgery.
21 August 2016
Our paper, A cable linkage with remote centre of motion, is now published in Mechanism and Machine Theory.
06 July 2016
A robot for assessing road surfaces has been successfully developed.
08 June 2016
A new research paper of path planning in distorted configuration space is published in Robotica.
22 February 2016
Our paper, A Skeletal Prototype of Surgical Arm Based on Dual-Triangular Mechanism by S Liu, L Harewood, B Chen and C Chen, is now accepted by Journal of Mechanisms and Robotics.
10 February 2016
Congratulations to Wesley for his new post-doc fellowship at UTS.
04 February 2016
Our paper, Inverse dynamic modelling of a three-legged six-degree-of-freedom parallel mechanism by S Abeywardena and C Chen, is now published by Multibody System Dynamics.
2015
01 December 2015
Thanks to Shao and Wesley, the workshops in the Department of Mechanical and Aerospace Engineering for students from John Monash Science School were successfully run.
25 August 2015
Dinner for celebrating Wesley’s thesis submission.

30 July 2015
Congratulations to Wesley for submitting his PhD thesis: Path Planning of Parallel Manipulators in Conguration Space.
08 July 2015
Thanks to Shao, the Year 8 ChallENGe workshops in the Department of Mechanical and Aerospace Engineering were successfully run.
25 May 2015
Congratulations to Sajeeva for receiving his PhD with his thesis: The Monash Epicyclic Parallel Manipulator: A Novel Six Degree of Freedom Impedance-Type Haptic Device.
2014
17 July 2014
Congratulations to Sajeeva for the submission of his thesis: The Monash Epicyclic Parallel
Manipulator: A Novel Six Degree of Freedom Impedance-Type Haptic Device.
17 June 2014
Thanks to Shao and Wesley, the workshops in the Department of Mechanical and Aerospace Engineering for students from John Monash Science School were successfully run.
04 April 2014
The prototype of the RCM surgical arm was completed by Shao and Richard.
04 April 2014
Thanks to the efforts of all graduate students in LMGA, the first teaching experimental lab in MEC4456/TRC4800 was successfully conducted today.
21 March 2014
Congratulation to Wesley for the paper of “Generation of the Global Workspace Roadmap of the 3-RPR Using Rotary Disk Search” being accepted by Theory of Machines and Mechanism
21 March 2014
Congratulation to Stanley for the award of PhD!
18 March 2014
Congratulation to Jiabin for the paper of “Power analysis of two-dof epicyclic gear transmission and experimental validation” being accepted by the international gear conference.