Congratulations to Dilshan
Congratulations to Dilshan for the acceptance of the manuscript “A Deep Learning-Based Multi-Modal Approach to Robust Place Recognition in Challenging Orchard Environments” for publication in Expert Systems With Applications.
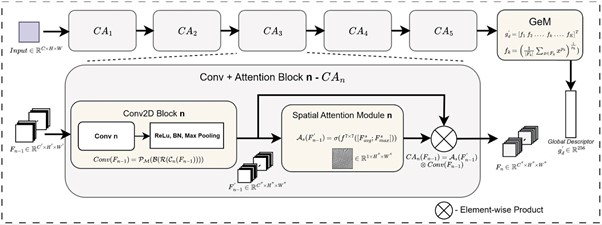
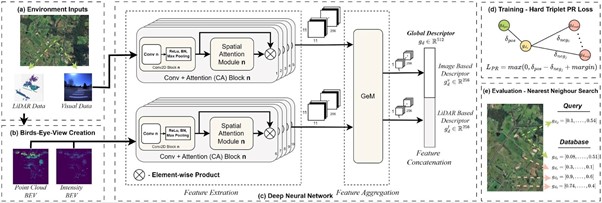
Place recognition plays a critical role in enabling long-term autonomy by allowing robots to identify previously visited locations and correct drift within SLAM systems. This research introduces a novel multi-modal deep learning framework for place recognition that jointly leverages RGB images, LiDAR point-cloud Bird’s-Eye-Views, and LiDAR-intensity Bird’s-Eye-Views to generate a highly discriminative global descriptor for loop closure in SLAM systems. Unlike existing hybrid approaches that fuse only two sensing modalities, the proposed method integrates complementary geometric, semantic, and surface-reflectance information within a unified architecture incorporating Spatial Attention and Generalized Mean (GeM) pooling with 2D convolutions, enabling both robustness and computational efficiency for real-world robotic deployment. The approach was extensively evaluated on publicly available datasets, including KITTI, Oxford RobotCar, and Oxford RobotCar-Intensity, as well as on a highly repetitive orchard dataset collected by our team, achieving state-of-the-art performance in Average Recall@1 and Average Recall@1% with strong cross-domain generalization. Notably, the inclusion of LiDAR-intensity BEVs significantly enhances recognition in repetitive agricultural rows where RGB and geometric cues alone are unreliable, improving AR@1 by up to 16% and demonstrating the practical value of surface-reflectance information for robust, long-term autonomous operation in challenging environments.