Congratulations to Junlong
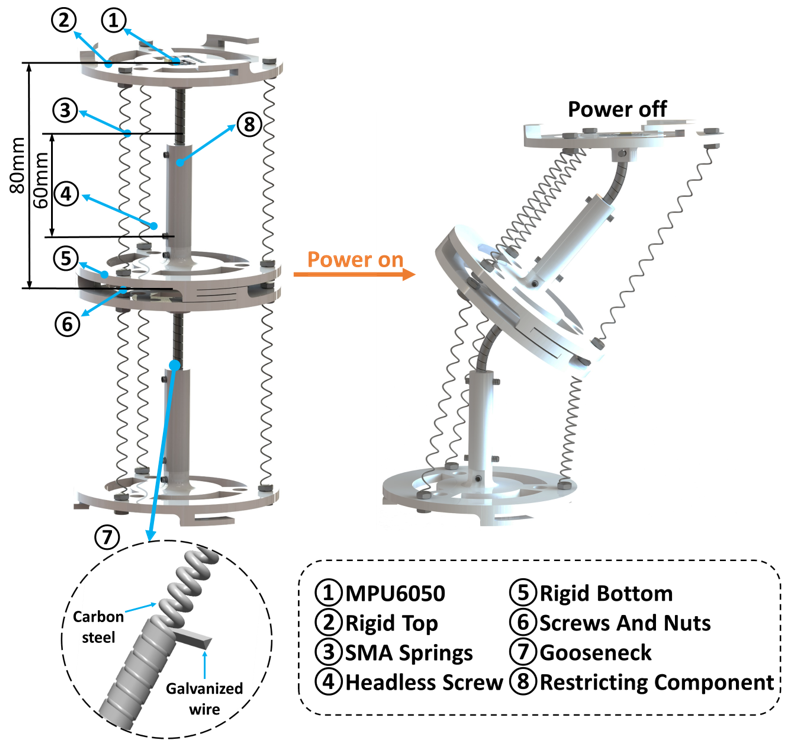
Congratulations to Junlong for the acceptance of the manuscript “A Novel Shape Memory Alloy Modular Robot with Spatially Stable Structure” for publication in Advanced Intelligent Systems. This article presented a novel SMA modular robot with a spatially stable structure by utilising a gooseneck as the backbone. It is the first time that a concept of spatially stable structure has been proposed. This innovation significantly enhances the robot's stability and ability to resist external disturbances without additional control mechanisms or energy consumption. For details, please find https://doi.org/10.1002/aisy.202400091