Congratulations to Hugh and Ayham
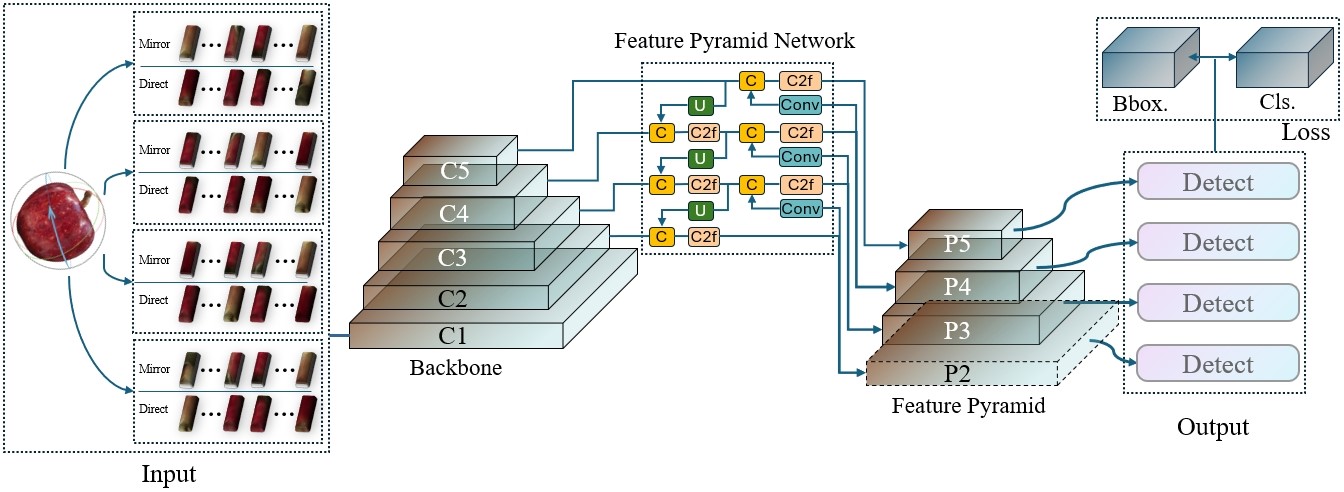
Congratulations to Hugh and Ayham on the acceptance of the manuscript " Finger Vision Enabled Real-Time Defect Detection in Robotic Harvesting" for publication in Computers and Electronics in Agriculture. This study introduces a pioneering solution for pre-harvest fruit defect detection in the agricultural industry. Based on a comprehensive analysis of camera configurations for fruit inspection, an eye-in-finger configuration is proposed for the first time in the field, a versatile finger is created that transforms a robotic gripper from merely a grasping tool into a powerful inspection device. A real-time detection algorithm incorporating YOLOv8-p2 was developed and successfully validated in the field with a precision of up to 98%, indicating a significant potential of automating pre-harvest inspection, reducing labour costs, and mitigating the time and resources spent on post-harvest sorting.