Congratulations to Ruijie Zhang
Congratulations to Ruijie Zhang for completing the master's degree thesis examination.
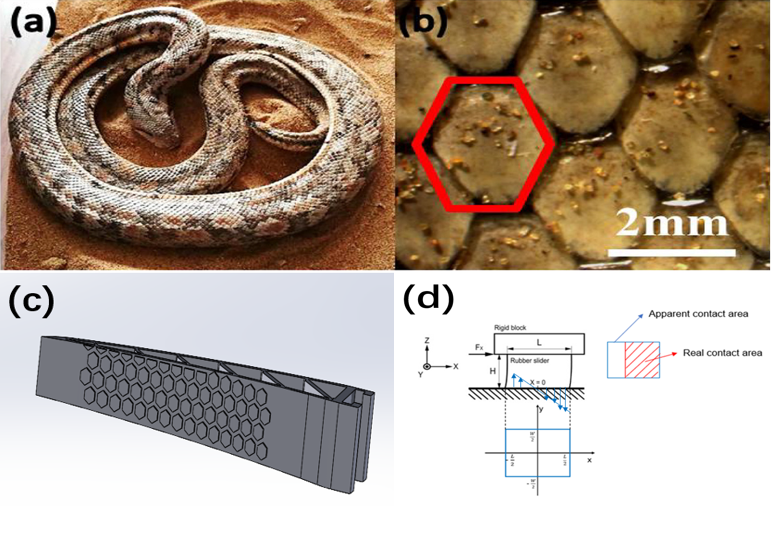
The thesis title is “Modeling of Hexagonal Patterns for Adaptive Robotic Grippers on
Uneven Surfaces.” This research focuses on developing deformable surfaces based on
hexagonal structures to improve adaptability and contact friction in robotic grippers and
enhance the performance of robotic grippers when handling irregularly shaped objects.