Congratulations to Eugene
Congratulations to Eugene for the acceptance of the manuscript " Occluded apples orientation estimator based on deep learning model for robotic harvesting " for publication in Computers and Electronic Agriculture.
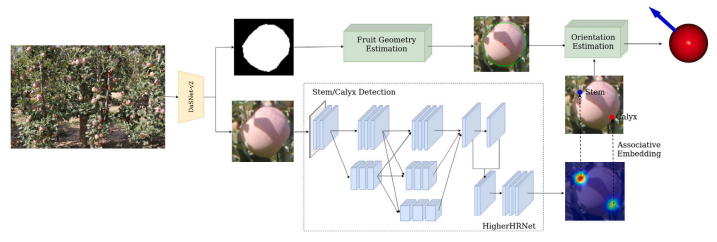
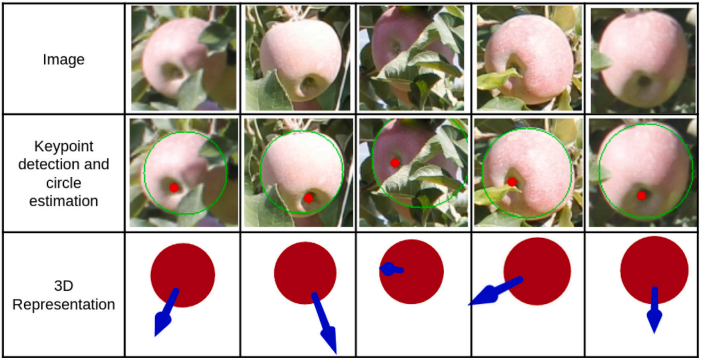
This work presents a novel approach that aims to estimate the orientation of fruits by projecting 2D information onto a 3D space. This method specifically targets the field of robotic harvesting and leverages multiple well-established and reliable fundamental methods currently available that includes keypoint detection neural network and circle detection based on extracted line segments of occluded apple. The proposed method is evaluated using a publicly available 3D point cloud data of 11 apple trees and the results show that the performance of the proposed method is comparable to existing research when under heavy occlusion and thus it is suitable for harvesting robots operating in the orchard farm. For details, please read our paper at the following link: https://authors.elsevier.com/sd/article/S0168-1699(24)00172-8