Congratulations to Junlong
Congratulations to Junlong for the acceptance of the manuscript “A Bioinspired Gripper with Continuously Stable Structure” for publication in International Journal of Mechanical Sciences
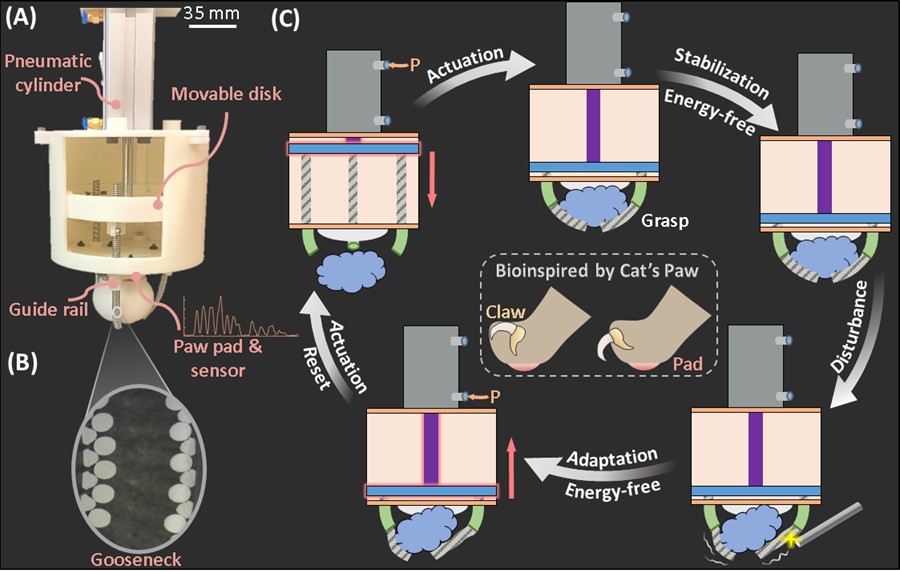
This work addresses a long-standing challenge in robotics, which is reconcile the flexibility of soft structures with the robustness of rigid structures. It reveals the underlying mechanism and static model of the gooseneck for the first time and propose a cat’s paw–inspired gripper with passive continuous stability, which effectively reproduces the functional repertoire of a cat’s paw. By allowing the fingers to extend and retract, the gripper fundamentally resolves the issue of accumulated and unpredictable deformation in existing passively stable structures. A force sensor embedded in the paw pad enables object detection, automatic grasping, and force monitoring. Grasping diversity experiments demonstrate the versatility and potential of this mechanism for harvesting, industrial automation, and field robotics. Depending on the configuration, it can achieve automatic object detection and grasping, perch on a rod without consuming energy, or serve as a soft landing mechanism to absorb impact during rapid descent. This work, entitled 'A Bioinspired Gripper with Continuously Stable Structure', has been published in the International Journal of Mechanical Sciences. For details, please find https://doi.org/10.1016/j.ijmecsci.2026.111592