Scalable Robotic Hand Prostheses for Children
Scalable Robotic Hand Prostheses for Children
Project overview
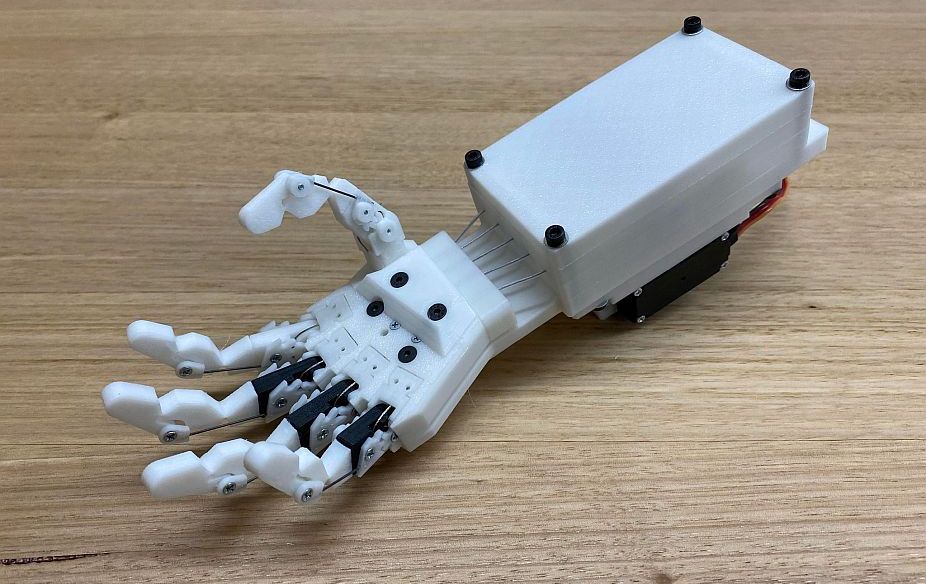
This project aims to fill the gap associated with the absence of suitable hand prostheses for young amputees, by means of creating novel solutions on prosthetic finger design and user intention detection. The new finger design features highly anthropomorphic motion, enhanced grasping force capability, grasping adaptability, and promoted scalability.
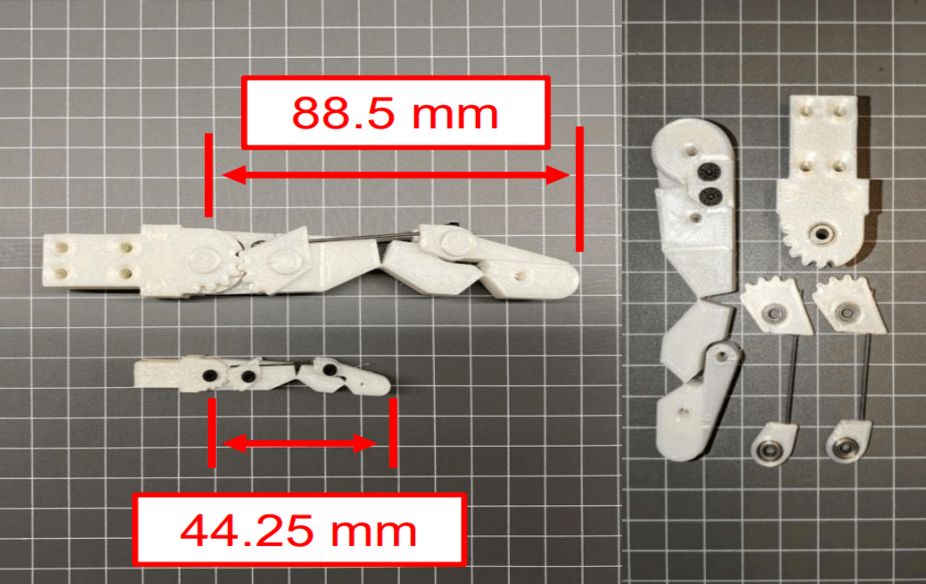
This design innovatively introduces a pair of epicyclic gear such that the finger mimics the flexion-extension trajectory of a human finger, leading to an increased likelihood of achieving successful grasping. Moreover, our design features approximately half of the number of links and joints compared to the current state-of-the-art articulated finger designs; its scalability has been demonstrated by a prototype at 50% scale of an adult-size hand - the size suitable for children four years old or younger.
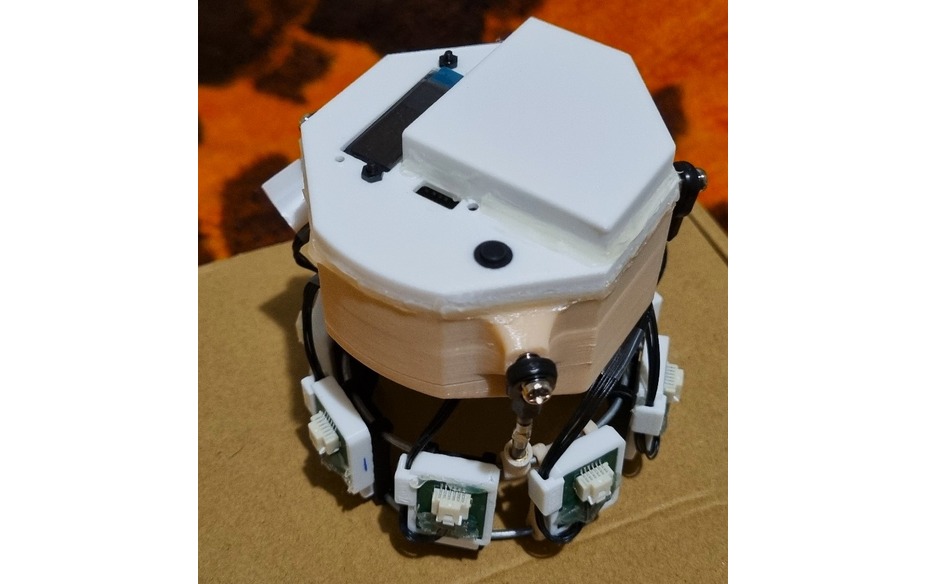
The proposed user intention detection system is based on the innovative use of a near E-field sensor array and neural network classification algorithms. The former monitors changes in the forearm topography around the circumference of the user’s forearm. While the latter predicts the intended movement of the wrist and fingers using the sensor data gathered, highlighting forearm muscle activation. Additionally, the former is readily scalable thanks to the compact sensor size. By having non-contacting sensors, our solution also reduces user discomfort and enhances sensing robustness against sweat and variations in skin temperature.